设计自平衡机器人
前段时间的一些文章中都提到制作自平衡机器人的相关部件,如:
包含步进电机驱动板、Arduino Leonardo和ESP 8266 WIfi模块。目前,零件陆续准备完成,花了两天时间采用123D设计了一款自评和机器人模型。关于123D使用推荐两本图书。
教程1: 《3D打印建模》 https://s.click.taobao.com/gxTyfUw
教程2: 《图解3D打印》https://s.click.taobao.com/VxSyfUw
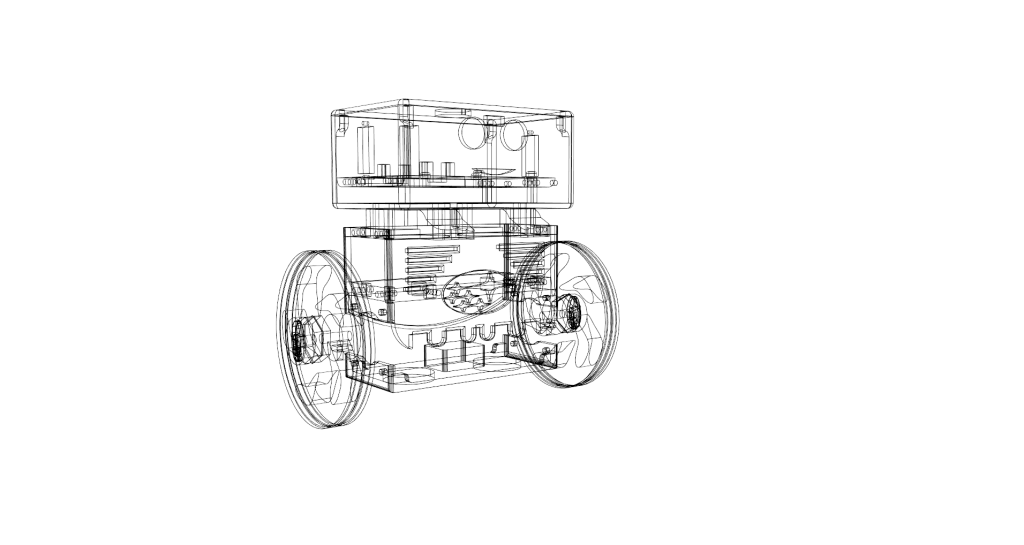
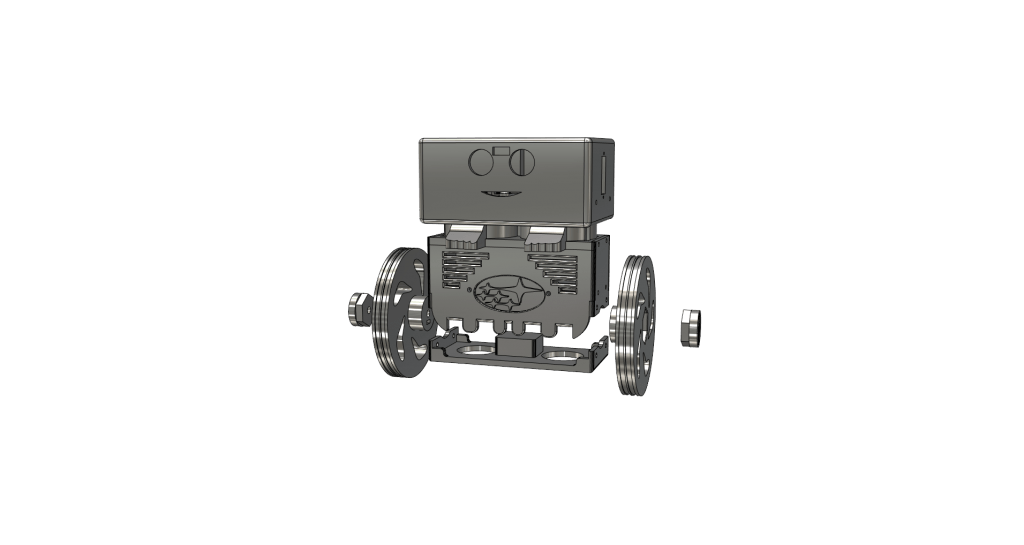
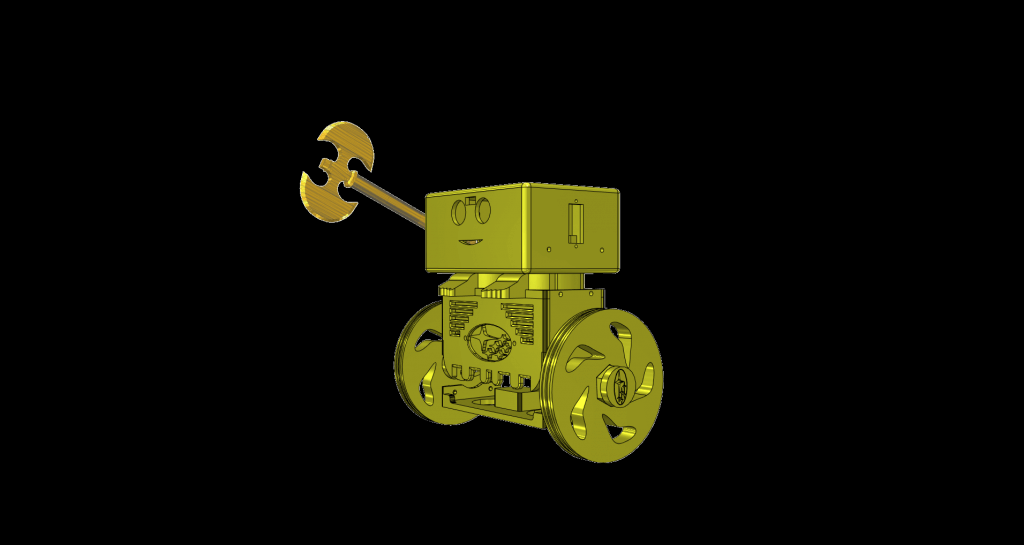
首先是完成后的透视图。
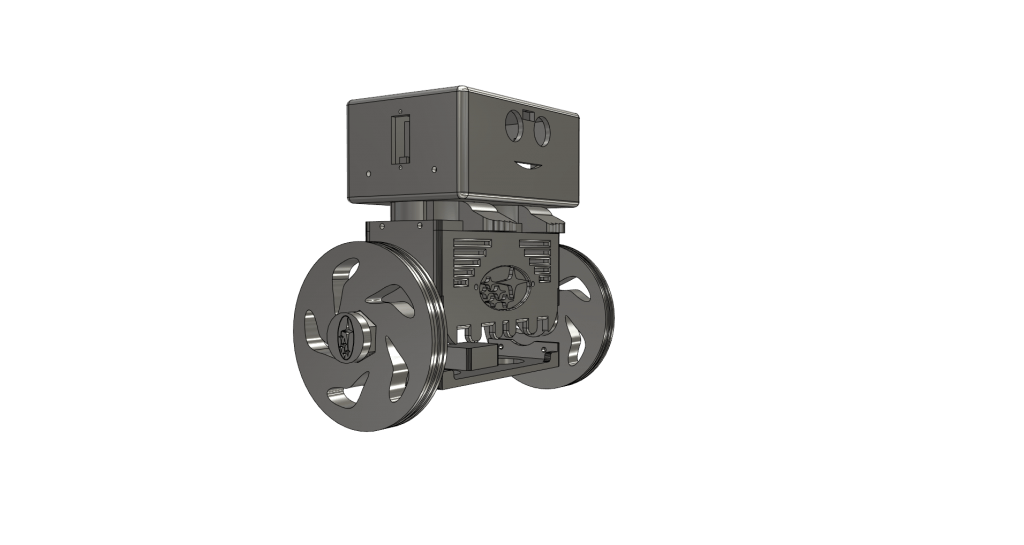
右侧视图
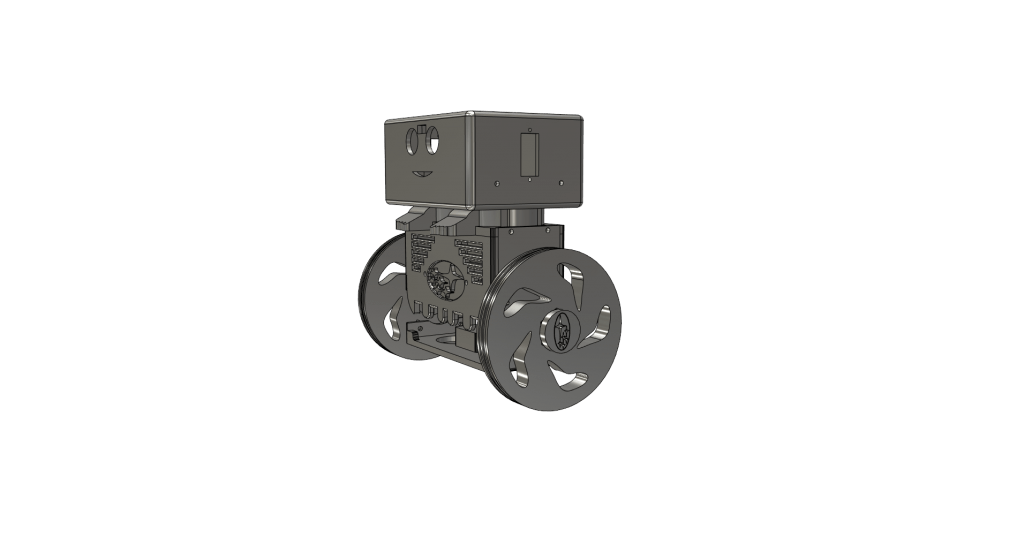
左侧视图。
通过这次设计,对A123D 软件的使用有了更加深刻的理解。关于123D软件教程有兴趣的可以看看
123D Design 如何修改 Axidraw X轴 STL 文件
教程1: 《3D打印建模》 https://s.click.taobao.com/gxTyfUw
教程2: 《图解3D打印》https://s.click.taobao.com/VxSyfUw
推荐一道书")

")




")
