在树莓派上通过Python读取MPU-6050的数据
在前一篇文章:MPU6050如何与树莓派进行连接 中,我们讨论了如何将加速计和陀螺传感器连接到树莓派,在这篇文章中,我们继续探讨通过一些简单的Python代码来读取传感器MPU6050输出的数据。
前期代码验证
要通过Python从I2C总线上读取相应数据,首先需要在树莓派上安装 smbus 模块,安装代码如下:
sudo apt-get install python-smbus
现在我们可以通过以下代码来进行测试了,这只是一些简单的测试代码,目的是测试传感器是否正常工作:
#!/usr/bin/python
import smbus
import math
# Power management registers
power_mgmt_1 = 0x6b
power_mgmt_2 = 0x6c
def read_byte(adr):
return bus.read_byte_data(address, adr)
def read_word(adr):
high = bus.read_byte_data(address, adr)
low = bus.read_byte_data(address, adr+1)
val = (high << 8) + low return val def read_word_2c(adr): val = read_word(adr) if (val >= 0x8000):
return -((65535 - val) + 1)
else:
return val
def dist(a,b):
return math.sqrt((a*a)+(b*b))
def get_y_rotation(x,y,z):
radians = math.atan2(x, dist(y,z))
return -math.degrees(radians)
def get_x_rotation(x,y,z):
radians = math.atan2(y, dist(x,z))
return math.degrees(radians)
bus = smbus.SMBus(0) # or bus = smbus.SMBus(1) for Revision 2 boards
address = 0x68 # This is the address value read via the i2cdetect command
# Now wake the 6050 up as it starts in sleep mode
bus.write_byte_data(address, power_mgmt_1, 0)
print "gyro data"
print "---------"
gyro_xout = read_word_2c(0x43)
gyro_yout = read_word_2c(0x45)
gyro_zout = read_word_2c(0x47)
print "gyro_xout: ", gyro_xout, " scaled: ", (gyro_xout / 131)
print "gyro_yout: ", gyro_yout, " scaled: ", (gyro_yout / 131)
print "gyro_zout: ", gyro_zout, " scaled: ", (gyro_zout / 131)
print
print "accelerometer data"
print "------------------"
accel_xout = read_word_2c(0x3b)
accel_yout = read_word_2c(0x3d)
accel_zout = read_word_2c(0x3f)
accel_xout_scaled = accel_xout / 16384.0
accel_yout_scaled = accel_yout / 16384.0
accel_zout_scaled = accel_zout / 16384.0
print "accel_xout: ", accel_xout, " scaled: ", accel_xout_scaled
print "accel_yout: ", accel_yout, " scaled: ", accel_yout_scaled
print "accel_zout: ", accel_zout, " scaled: ", accel_zout_scaled
print "x rotation: " , get_x_rotation(accel_xout_scaled, accel_yout_scaled, accel_zout_scaled)
print "y rotation: " , get_y_rotation(accel_xout_scaled, accel_yout_scaled, accel_zout_scaled)
运行代码后,我们将看到类似下表的输出结果:
gyro data --------- gyro_xout: -92 scaled: -1 gyro_yout: 294 scaled: 2 gyro_zout: -104 scaled: -1 accelerometer data ------------------ accel_xout: -3772 scaled: -0.230224609375 accel_yout: -52 scaled: -0.003173828125 accel_zout: 15408 scaled: 0.9404296875 x rotation: -13.7558411667 y rotation: -0.187818934829
解析加速度计的数据
让我们更详细地了解一下测试代码,
accel_xout = read_word_2c(0x3b) accel_yout = read_word_2c(0x3d) accel_zout = read_word_2c(0x3f)
这三行代码用于读取X,Y,Z的加速度计数值,每个参数调用的是存放在传感器寄存器中的数据。MPU6050传感器有许多寄存器,它们具有不同的功能,详见MPU6050的datasheet。用于加速数据的寄存器是0x3b、0x3d、0x3f,这些寄存器以16bit二进制补码的格式保存原始数据。
下面的代码从一个给定的寄存器中读取一个单字(16bits)并将其转换为二进制补码:
def read_word_2c(adr):
val = read_word(adr)
if (val >= 0x8000):
return -((65535 - val) + 1)
else:
return val
一旦我们获取了原始数据,我们就需要对它进行转换,然后把它转换成类似于旋转角度的数据。从MPU6050的datasheet数据表中我们可以看到,我们需要应用到原始加速度计值的默认转换值是16384,
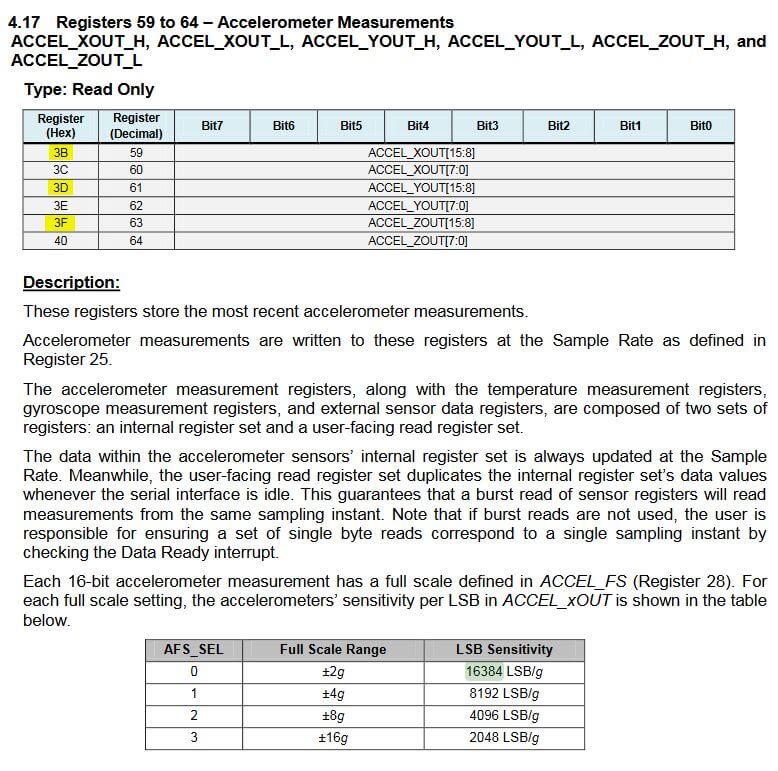
所以我们用这个值除以原始数据值。
accel_xout_scaled = accel_xout / 16384.0 accel_yout_scaled = accel_yout / 16384.0 accel_zout_scaled = accel_zout / 16384.0
现在我们得到了每个三维空间中重力对传感器施加的值,通过这个值我们可以计算出X轴和Y轴的旋转值。
def dist(a,b):
return math.sqrt((a*a)+(b*b))
def get_x_rotation(x,y,z):
radians = math.atan(x / dist(y,z))
return math.degrees(radians)
def get_y_rotation(x,y,z):
radians = math.atan(y / dist(x,z))
return math.degrees(radians)
这里我们计算出了X轴和Y轴的旋转角度,输出如下:
x rotation: -13.755841166 y rotation: -0.187818934829
这里可以看到,传感器的X轴旋转了-13.756度,Y轴旋转了-0.188度。
解析陀螺仪的数据
通过类似的方法,我们可以从MPU6050传感器的陀螺仪上读取数据。此功能通过以下代码来完成:
gyro_xout = read_word_2c(0x43) gyro_yout = read_word_2c(0x45) gyro_zout = read_word_2c(0x47) print "gyro_xout: ", gyro_xout, " scaled: ", (gyro_xout / 131) print "gyro_yout: ", gyro_yout, " scaled: ", (gyro_yout / 131) print "gyro_zout: ", gyro_zout, " scaled: ", (gyro_zout / 131)
首先读取寄存器0x43、0x45&0x47的值,同样的我们可以从MPU6050的datasheet中看到,这些寄存器保存着原始的陀螺仪的数据。为了转化获取的原始数据,这里需要除以131,可以得到每秒的旋转度数。

输出如下:
gyro_xout: -92 scaled: -1 gyro_yout: 294 scaled: 2 gyro_zout: -104 scaled: -1
结语
上述代码相对基础,你可以根据实际需要添加错误处理或配置不同的灵敏度。为了帮助我们更好地学习,还可以编写了一些简单的OpenGL代码来进行三维空间的图形化展示。
专题:MPU6050的使用技巧:
- Arduino如何使用MPU6050
- MPU6050的I2C接口测试
- 如何用Processing对MPU 6050的值进行3D建模
- 利用MPU6050来控制舵机
- MPU6050如何与树莓派进行连接
- 在树莓派上通过Python读取MPU-6050的数据








