树莓派连接MPU6050实现3D OpenGL可视化数据
前面的文章:在树莓派上通过Python读取MPU-6050的数据,文章中介绍了如何通过Python读取MPU6050的位置状态,今天我们讨论如何用读取的状态值来进行三维可视化,通过http协议实现在OpenGL模式下显示3D图像。下面进入主题:
创建简单的WEB服务器
首先基于web.py(它是Python的web框架,它非常简单但功能强大,同时它是开源程序。)创建一个简单的WEB服务器,这里需要通过 apt-get 进行安装
sudo apt-get install python-webpy
然后再创建一个目录,用于存放代码,同时我们将创建一个简单的测试程序。
mkdir webpy cd webpy vi server.py
测试代码如下:
#!/usr/bin/python
import web
urls = (
'/', 'index'
)
class index:
def GET(self):
return "Hello, world!"
if __name__ == "__main__":
app = web.application(urls, globals())
app.run()
保存代码server.py并将它设置为可执行文件
chmod +x server.py
然后运行代码
./server.py
你将看到下面的内容,表明服务器在等待请求
http://0.0.0.0:8080/
现在在你的浏览器地址栏中输入:http://树莓派的IP地址:8080,比如:http://192.168.1.65:8080,浏览器将会显示一个包含“Hello,world!”的网页,这样我们就可以利用这个WEB服务器来读取远程数据了。
在服务器中添加传感器的代码
使用下面的代码替换server.py的内容
#!/usr/bin/python
import web
import smbus
import math
urls = (
'/', 'index'
)
# Power management registers
power_mgmt_1 = 0x6b
power_mgmt_2 = 0x6c
bus = smbus.SMBus(0) # or bus = smbus.SMBus(1) for Revision 2 boards
address = 0x68 # This is the address value read via the i2cdetect command
def read_byte(adr):
return bus.read_byte_data(address, adr)
def read_word(adr):
high = bus.read_byte_data(address, adr)
low = bus.read_byte_data(address, adr+1)
val = (high << 8) + low
return val
def read_word_2c(adr):
val = read_word(adr)
if (val >= 0x8000):
return -((65535 - val) + 1)
else:
return val
def dist(a,b):
return math.sqrt((a*a)+(b*b))
def get_y_rotation(x,y,z):
radians = math.atan2(x, dist(y,z))
return -math.degrees(radians)
def get_x_rotation(x,y,z):
radians = math.atan2(y, dist(x,z))
return math.degrees(radians)
class index:
def GET(self):
accel_xout = read_word_2c(0x3b)
accel_yout = read_word_2c(0x3d)
accel_zout = read_word_2c(0x3f)
accel_xout_scaled = accel_xout / 16384.0
accel_yout_scaled = accel_yout / 16384.0
accel_zout_scaled = accel_zout / 16384.0
return str(get_x_rotation(accel_xout_scaled, accel_yout_scaled, accel_zout_scaled))+" "+str(get_y_rotation(accel_xout_scaled, accel_yout_scaled, accel_zout_scaled))
if __name__ == "__main__":
# Now wake the 6050 up as it starts in sleep mode
bus.write_byte_data(address, power_mgmt_1, 0)
app = web.application(urls, globals())
app.run()
服务器端以sudo运行文件,这样可以获取从I2C读取数据的权限。
sudo ./server.py
这样通过你的浏览器将得到X轴和Y轴的值。我的X轴和Y轴的当前值如下:
-28.7291281627 -39.4833542336
数据的三维可视化
因为使用的是Linux系统,因此不知道以下代码是否适用于Windows或mac系统,但需要说明的是代码并不是在树莓派上运行的,那样就不需要http协议了。下面是本次测试的代码。
首先安装OpenGL和pygame
sudo apt-get install python-opengl sudo apt-get install python-pygame
然后将下列代码保存为level.py文件,运行它
#!/usr/bin/python
import pygame
import urllib
from OpenGL.GL import *
from OpenGL.GLU import *
from math import radians
from pygame.locals import *
SCREEN_SIZE = (800, 600)
SCALAR = .5
SCALAR2 = 0.2
def resize(width, height):
glViewport(0, 0, width, height)
glMatrixMode(GL_PROJECTION)
glLoadIdentity()
gluPerspective(45.0, float(width) / height, 0.001, 10.0)
glMatrixMode(GL_MODELVIEW)
glLoadIdentity()
gluLookAt(0.0, 1.0, -5.0,
0.0, 0.0, 0.0,
0.0, 1.0, 0.0)
def init():
glEnable(GL_DEPTH_TEST)
glClearColor(0.0, 0.0, 0.0, 0.0)
glShadeModel(GL_SMOOTH)
glEnable(GL_BLEND)
glEnable(GL_POLYGON_SMOOTH)
glHint(GL_POLYGON_SMOOTH_HINT, GL_NICEST)
glEnable(GL_COLOR_MATERIAL)
glEnable(GL_LIGHTING)
glEnable(GL_LIGHT0)
glLightfv(GL_LIGHT0, GL_AMBIENT, (0.3, 0.3, 0.3, 1.0));
def read_values():
link = "http://192.168.1.65:8080" # Change this address to your settings
f = urllib.urlopen(link)
myfile = f.read()
return myfile.split(" ")
def run():
pygame.init()
screen = pygame.display.set_mode(SCREEN_SIZE, HWSURFACE | OPENGL | DOUBLEBUF)
resize(*SCREEN_SIZE)
init()
clock = pygame.time.Clock()
cube = Cube((0.0, 0.0, 0.0), (.5, .5, .7))
angle = 0
while True:
then = pygame.time.get_ticks()
for event in pygame.event.get():
if event.type == QUIT:
return
if event.type == KEYUP and event.key == K_ESCAPE:
return
values = read_values()
x_angle = values[0]
y_angle = values[1]
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT)
glColor((1.,1.,1.))
glLineWidth(1)
glBegin(GL_LINES)
for x in range(-20, 22, 2):
glVertex3f(x/10.,-1,-1)
glVertex3f(x/10.,-1,1)
for x in range(-20, 22, 2):
glVertex3f(x/10.,-1, 1)
glVertex3f(x/10., 1, 1)
for z in range(-10, 12, 2):
glVertex3f(-2, -1, z/10.)
glVertex3f( 2, -1, z/10.)
for z in range(-10, 12, 2):
glVertex3f(-2, -1, z/10.)
glVertex3f(-2, 1, z/10.)
for z in range(-10, 12, 2):
glVertex3f( 2, -1, z/10.)
glVertex3f( 2, 1, z/10.)
for y in range(-10, 12, 2):
glVertex3f(-2, y/10., 1)
glVertex3f( 2, y/10., 1)
for y in range(-10, 12, 2):
glVertex3f(-2, y/10., 1)
glVertex3f(-2, y/10., -1)
for y in range(-10, 12, 2):
glVertex3f(2, y/10., 1)
glVertex3f(2, y/10., -1)
glEnd()
glPushMatrix()
glRotate(float(x_angle), 1, 0, 0)
glRotate(-float(y_angle), 0, 0, 1)
cube.render()
glPopMatrix()
pygame.display.flip()
class Cube(object):
def __init__(self, position, color):
self.position = position
self.color = color
# Cube information
num_faces = 6
vertices = [ (-1.0, -0.05, 0.5),
(1.0, -0.05, 0.5),
(1.0, 0.05, 0.5),
(-1.0, 0.05, 0.5),
(-1.0, -0.05, -0.5),
(1.0, -0.05, -0.5),
(1.0, 0.05, -0.5),
(-1.0, 0.05, -0.5) ]
normals = [ (0.0, 0.0, +1.0), # front
(0.0, 0.0, -1.0), # back
(+1.0, 0.0, 0.0), # right
(-1.0, 0.0, 0.0), # left
(0.0, +1.0, 0.0), # top
(0.0, -1.0, 0.0) ] # bottom
vertex_indices = [ (0, 1, 2, 3), # front
(4, 5, 6, 7), # back
(1, 5, 6, 2), # right
(0, 4, 7, 3), # left
(3, 2, 6, 7), # top
(0, 1, 5, 4) ] # bottom
def render(self):
then = pygame.time.get_ticks()
glColor(self.color)
vertices = self.vertices
# Draw all 6 faces of the cube
glBegin(GL_QUADS)
for face_no in xrange(self.num_faces):
glNormal3dv(self.normals[face_no])
v1, v2, v3, v4 = self.vertex_indices[face_no]
glVertex(vertices[v1])
glVertex(vertices[v2])
glVertex(vertices[v3])
glVertex(vertices[v4])
glEnd()
if __name__ == "__main__":
run()
请把上面代码中IP地址:http://192.168.1.65:8080 改为您的树莓派IP地址。这样,当您运行level.py时,将会显示MPU6050传感器的当前的三维位置模型,当我们旋转传感器时3D图像将进行实时变化。
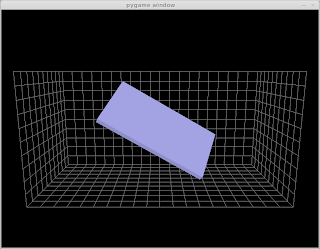
你可能会注意到,当传感器静止时图像会发生抖动,这是噪声数据导致的。








