GRBL入门配置需关注的几个参数
GRBL的确是非常优秀的程序,硬件要求低,配置简单。在前期GRBL 1.1h固件XY型写字机器人的归航设置一文中简单做了一些记录。下面以GRBL1.1h为基础,再记录一下新入手GRBL需关注的一些参数。
GRBL1.1h配置参数
$
输入$并按回车键让Grbl打印出帮助信息。 输出:
[HLP:$$ $# $G $I $N $x=val $Nx=line $J=line $SLP $C $X $H ~ ! ? ctrl-x]
ok
$$
查看Grbl的设置参数。输出:
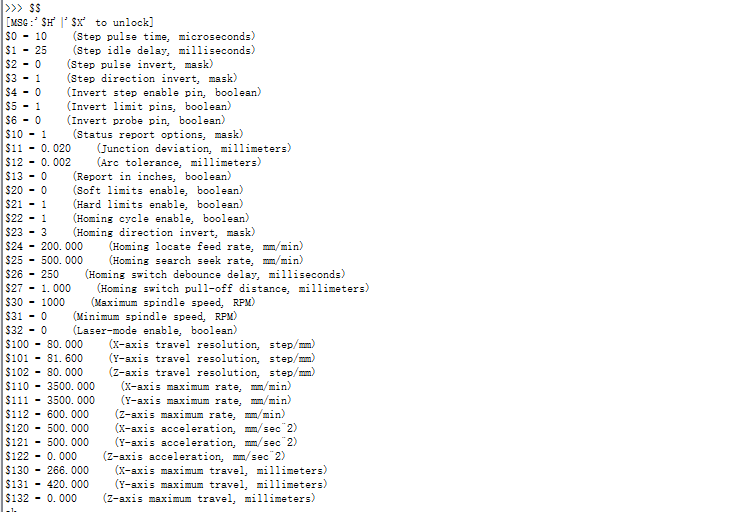
在$$命令输出结果中,对于初次配置有几个参数是需要根据实际情况,对其进行修改的,比如$3,可以通过修改它实现电机方向的反转。
$3 步进电机驱动方向位掩码
| Setting Value | Mask | Invert X | Invert Y | Invert Z |
|---|---|---|---|---|
| 0 | 00000000 | N | N | N |
| 1 | 00000001 | Y | N | N |
| 2 | 00000010 | N | Y | N |
| 3 | 00000011 | Y | Y | N |
| 4 | 00000100 | N | N | Y |
| 5 | 00000101 | Y | N | Y |
| 6 | 00000110 | N | Y | Y |
| 7 | 00000111 | Y | Y | Y |
$3命令,可以修改它实现电机方向的反转。 要配置此参数,只需发送想要反转轴的值。见上面的表格参数。例如,如果只反转Y轴方向,需要发送$3=2到Grbl。
$100 , $101 , $102 [X ,Y ,Z]速度转化参数
$100 , $101 , $102 用于设置XYZ三个轴的电机每一步实际运行的距离。需要根据实际计算对应轴的步长/毫米。计算前,需要知道步进电机每转一圈需要的步数(通常为200);控制器的细分数(通常为1、2、4、8或16);最后一个参数是电机每转动一圈同步带或轴行驶的距离(如GT2同步带,同步轮为20齿,则此参数为20*2=40mm)。然后计算一下:“步长/毫米 = 步进电机每转一圈需要的步数 * 控制器的细分数 / 电机每转动一圈同步带或轴行驶的距离 ”,则此参数=200*16(假设为16细分)/40=3200/40=80,表示步进电机转动80步,则实际距离行驶1mm。
$ 130,$ 131,$ 132 – [X,Y,Z]最大行程
这三个参数是设置每个轴的最大行程。仅当启用了软件限位和Homing归航时,此功能才有用,Grbl的软限位功能用于检查机器是否超出了行程限制的。
以上是个人认为GRBL入门需关注的几个参数,不当之处请海涵!








