SRF02超声波测距模块的连接

SRF02超声波测距模块的技术参数
范围: 16cm – 6m.
电源:5v, 4mA .
频率:40KHz.
外形尺寸:24mm(长) x 20mm(宽) x 17mm(高) .
通信协议:标准 I2C 总线或串行总线,最多可连接16个模块.
重量:4.6克.
目前,I2C总线可以在大多数控制器上使用,如Arduino、树莓派、香蕉派等等开发板,对于程序员来说,SRF02的使用与使用普通24xx系列芯片的EEPROM是一样简单,只不过I2C总线地址不同而已。SRF02 默认的总线地址是 0xE0 ,当然也可以更改,可使用的16位地址分别为:E0、E2、E4、E6、E8、EA、EC、EE、F0、F2、F4、F6、F8、FA、FC或FE,因此在一条I2C总线上我们最多可以使用16个超声波测距模块。(如果要使SRF02超声波测距模块工作在I2C模式下,MODE 引脚必须是断开的。)
SRF02超声波模块I2C总线接口示意
SRF02的引脚与SRF08和SRF10是完全相同的,需要注意:在I2C总线上需要在主控装置侧设置一对1.8K的上拉电阻分别连接至模块的SCL引脚和SDA引脚,I2C总线上只设置一对电阻,而不是每个模块设置一对,在I2C总线上SRF02只能作为从属设备。如果你采用的主控设备本身已内置了上拉电阻,则就没有必要再次设置了。
SRF02超声波测距模块的引脚定义

通常,我们只使用+5V、SDA、SCL和GND四个引脚,Mode引脚悬空。正如前面提到的I2C总线上需要在主控端串接一对上拉电阻,如下图:
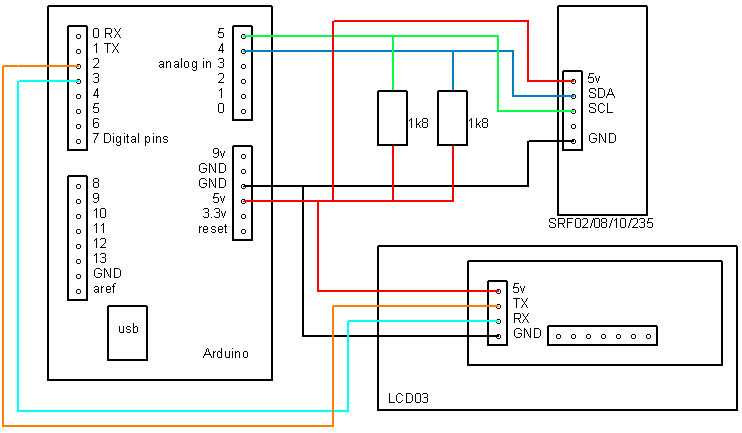
SRF02与Arduino的连接方式和SRF08和SRF10等模块的连接方式也完全相同。图中为了后续测试便利同样采用串口方式接入了LCD1602显示器,可查阅:1602 LCD液晶屏引脚定义图了解LCD1602。普通1602显示屏要使用串口连接,需要用到LCD1602-串口转接板,可是我并未找到购买地址….只能从robot-electronics复制Arduino测试代码,供参考:
/*
Generic example for the SRF modules 02, 08, 10 and 235.
Only the SRF08 uses the light saensor so when any other
range finder is used with this code the light reading will
be a constant value.
*/
#include <Wire.h>
#include <SoftwareSerial.h>
#define LCD_RX 0x02 // Software serial pin for rx
#define LCD_TX 0x03 // Software serial pin for tx
#define SRF_ADDRESS 0x70 // Address of the SRF08
#define CMD (byte)0x00 // Command byte, values of 0 being sent with write have to be masked as a byte to stop them being misinterpreted as NULL this is a bug with arduino 1.0
#define LIGHTBYTE 0x01 // Byte to read light sensor
#define RANGEBYTE 0x02 // Byte for start of ranging data
#define LCD03_CLEAR 0x0C // Byte to clear LCD1602 screen
#define LCD03_SET_CUR 0x02 // Byte to tell LCD1602 we wish to move cursor
#define LCD03_HIDE_CUR 0x04 // Byte to hide the cursor
SoftwareSerial lcd_03 = SoftwareSerial(LCD_RX, LCD_TX); // defines a new software serial port for lcd_1602
byte highByte = 0x00; // Stores high byte from ranging
byte lowByte = 0x00; // Stored low byte from ranging
void setup(){
lcd_03.begin(9600); // Begins serial port for LCD_03
Wire.begin();
delay(100); // Waits to make sure everything is powered up before sending or receiving data
lcd_03.write(LCD03_CLEAR);
lcd_03.write(LCD03_HIDE_CUR);
lcd_03.println("SRF02/08/10/235");
int softRev = getSoft(); // Calls function to get software revision
lcd_03.write(LCD03_SET_CUR);
lcd_03.write(61); // Move cursor
lcd_03.print("Software version: ");
lcd_03.print(softRev, DEC); // Print softRev to LCD03
}
void loop(){
int rangeData = getRange(); // Calls a function to get range
lcd_03.write(LCD03_SET_CUR);
lcd_03.write(21); // Move cursor to space 21
lcd_03.print("Range = ");
lcd_03.print(rangeData, DEC); // Print rangeData to LCD03
lcd_03.print(" "); // Print some spaces to slear spaces after data
int lightData = getLight(); // Call function to get light reading and store in lightData
lcd_03.write(LCD03_SET_CUR);
lcd_03.write(41); // Move cursor to space 41
lcd_03.print("light = ");
lcd_03.print(lightData, DEC); // Display lightData
lcd_03.print(" "); // Print some spaces to slear spaces after data
delay(100); // Wait before looping
}
int getRange(){ // This function gets a ranging from the SRF08
int range = 0;
Wire.beginTransmission(SRF_ADDRESS); // Start communticating with SRF08
Wire.write(CMD); // Send Command Byte
Wire.write(0x51); // Send 0x51 to start a ranging
Wire.endTransmission();
delay(100); // Wait for ranging to be complete
Wire.beginTransmission(SRF_ADDRESS); // start communicating with SRFmodule
Wire.write(RANGEBYTE); // Call the register for start of ranging data
Wire.endTransmission();
Wire.requestFrom(SRF_ADDRESS, 2); // Request 2 bytes from SRF module
while(Wire.available() < 2); // Wait for data to arrive
highByte = Wire.read(); // Get high byte
lowByte = Wire.read(); // Get low byte
range = (highByte << 8) + lowByte; // Put them together
return(range); // Returns Range
}
int getLight(){ // Function to get light reading
Wire.beginTransmission(SRF_ADDRESS);
Wire.write(LIGHTBYTE); // Call register to get light reading
Wire.endTransmission();
Wire.requestFrom(SRF_ADDRESS, 1); // Request 1 byte
while(Wire.available() < 0); // While byte available
int lightRead = Wire.read(); // Get light reading
return(lightRead); // Returns lightRead
}
int getSoft(){ // Function to get software revision
Wire.beginTransmission(SRF_ADDRESS); // Begin communication with the SRF module
Wire.write(CMD); // Sends the command bit, when this bit is read it returns the software revision
Wire.endTransmission();
Wire.requestFrom(SRF_ADDRESS, 1); // Request 1 byte
while(Wire.available() < 0); // While byte available
int software = Wire.read(); // Get byte
return(software);
}
树莓派的测试代码如下:
// SRF02 Raspberry pi 测试代码. // // 代码同样支持SRF02/ 10/ 235 和 08. // By James Henderson, 2016. #include#include #include #include #include #include #include #include #include int main(int argc, char **argv) { printf("**** SRF02/10/235 example program ****\n"); int fd; // File descrition // For older raspberry pi modules use "/dev/i2c-0" instead of "/dev/i2c-1" for the i2c port char *fileName = "/dev/i2c-1"; // Name of the port we will be using int address = 0x70; // Address of the SRF02 shifted right one bit unsigned char buf[10]; // Buffer for data being read/ written on the i2c bus if ((fd = open(fileName, O_RDWR)) < 0) { // Open port for reading and writing printf("Failed to open i2c port\n"); exit(1); } if (ioctl(fd, I2C_SLAVE, address) < 0) { // Set the port options and set the address of the device we wish to speak to printf("Unable to get bus access to talk to slave\n"); exit(1); } buf[0] = 0; // Commands for performing a ranging buf[1] = 81; if ((write(fd, buf, 2)) != 2) { // Write commands to the i2c port printf("Error writing to i2c slave\n"); exit(1); } usleep(900000); // This sleep waits for the ping to come back buf[0] = 0; // This is the register we wish to read from if ((write(fd, buf, 1)) != 1) { // Send the register to read from printf("Error writing to i2c slave\n"); exit(1); } if (read(fd, buf, 4) != 4) { // Read back data into buf[] printf("Unable to read from slave\n"); exit(1); } else { unsigned char highByte = buf[2]; unsigned char lowByte = buf[3]; unsigned int result = highByte; // Calculate range as a word value result <<= 8; result += lowByte; printf("Software v: %d\n",buf[0]); printf("Range was: %u\n",result); } close(fd); return 0; }
专题:超声波测距模块:
- HC-SR04超声波测距模块的测试
- SRF02超声波测距模块的连接
- KS103测距模块很牛
- 在树莓派上测试防水型超声波测距模块



")




