什么是舵机?
我们常说的舵机,它的学名叫做伺服电机,它是一种带有输出轴的小装置。该轴可以 通过发送伺服编码信号定位到特定的位置,也就是可以定义角度。只要编码信号存在,伺服电机就会一直保持轴的角度位置。随着编码信号的改变,轴的角度位置也随之改变。实际上,伺服系统在无线电控制的飞机上被用来控制尾舵和船舵。它们也用于无线电控制的汽车、航模等,当然还有机器人。

伺服电机的结构
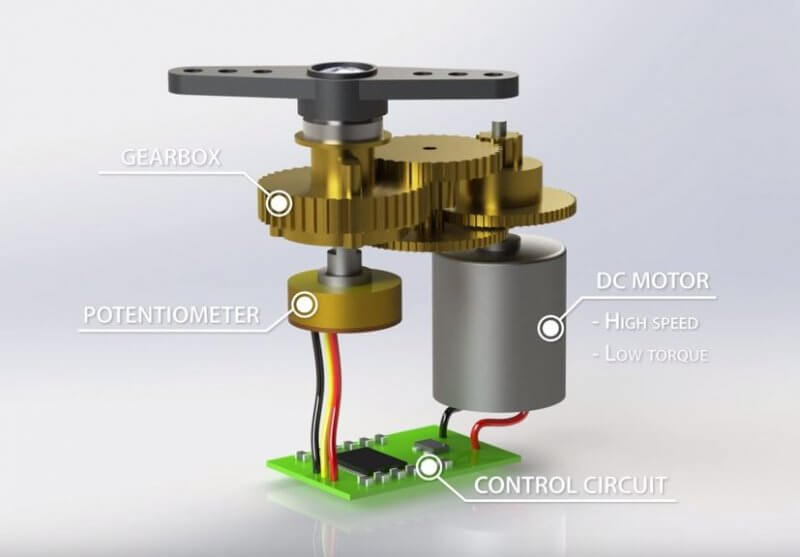
伺服电机在机器人技术中非常有用。如上图所示,这些马达体积很小,它们内置了控制电路。标准伺服系统,如Futaba S-148有42盎司/英寸的扭矩(相当于1.2千克的扭矩), 对于它的体积来说,已经非常强大了 。它还可以根据负载的变化调整功率。因此,负载较轻的伺服系统不会消耗太多的能量。伺服电机的内部结构如上图所示。你可以看到控制电路,马达,一组齿轮,还有外壳。你还可以看到连接外部的3根连线。
伺服电机的工作原理
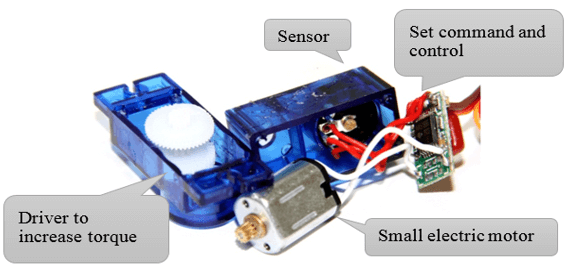
那么,伺服系统是如何工作的呢?伺服电机有一些控制电路和一个电位器(一个可变电阻),连接到输出轴。在上面的图片中,可以看到可变电阻在电路板的左边,三根红线连接处。可变电阻允许控制电路监控伺服电机的电流角度。如果轴的角度正确,则电机关闭。如果电路发现角度不正确,将电机转到正确的方向,直到角度正确。伺服系统的输出轴可以移动180度左右 。
伺服电机的比例控制
施加在电动机上的功率与它需要行进的距离成正比。所以,如果轴需要转很长的距离,电机将全速运行。如果只需要转一小圈,电机就会以较慢的速度运转。这叫做比例控制。
如何控制伺服电机的角度?
如何控制伺服电机转向的角度呢?控制线用来传达角度信号。角度是由施加在控制导线上的脉冲的持续时间决定的。这叫做脉冲编码调制。伺服系统期望每20毫秒看到一个脉冲(.02秒)。脉冲的长度将决定电机转多远距离。
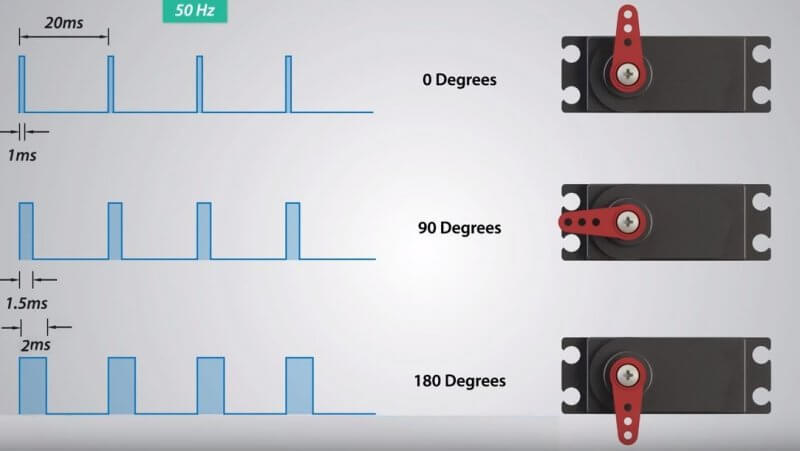
例如,1.5毫秒的脉冲将使电机转到90度位置(通常称为中性位置)。如果脉冲小于1.5 ms,则电机将轴向接近0度。如果脉冲大于1.5ms,则轴向180度方向旋转。
详细可查阅:舵机角度的控制原理
如上图所示,脉冲的持续时间决定了输出轴的角度。注意这里的时间是说明性的,实际的时间取决于电机制造商。然而,原理是一样的。








