如何用Processing对MPU 6050的值进行3D建模
安装Processing及其依赖库
接上文:Arduino如何使用MPU6050 。本文介绍如何将MPU 6050传感器的值进行3D建模,要想直观的查看MPU6050的三维数据,我们需要安装Processing,Processing 除了几个函数的区别外,其它和Arduino IDE区别不大,Processing主要用于处理可视化数据,并可以将数据呈现为2d或3d模型。Processing下载地址:https://processing.org/download/?processing
在安装了 Processing IDE之后,您还需要安装“toxiclibs”库(链接更新: https://pan.baidu.com/s/118UlETedm23tcE_5Pd3rTg 提取码: b5zh ),这个库对于Arduino和MPU 6050的3D测试来说是必须的。接下来,解压库文件,将“toxiclibs-complete-0020”的文件夹放到Processing的“libraries”文件夹中。如何查看Processing的“libraries”文件夹位置呢?它和Arduino IDE一样,可以通过“File–>Preferences…–>Sketchbook Location”进行修改或查看。如果在Sketchbook文件夹下找不到 libraries文件夹,那么就新建一个名为“libraries”的新文件夹,并将里面的toxiclibs粘贴到里面去即可。
修改MPU6050_DMP6.ino
要在Processing中呈现3D模型,依赖于MPU 6050的Arduino示例代码MPU6050_DMP6.ino。我们需要对它做点小修改,然后通过Arduino IDE上传。
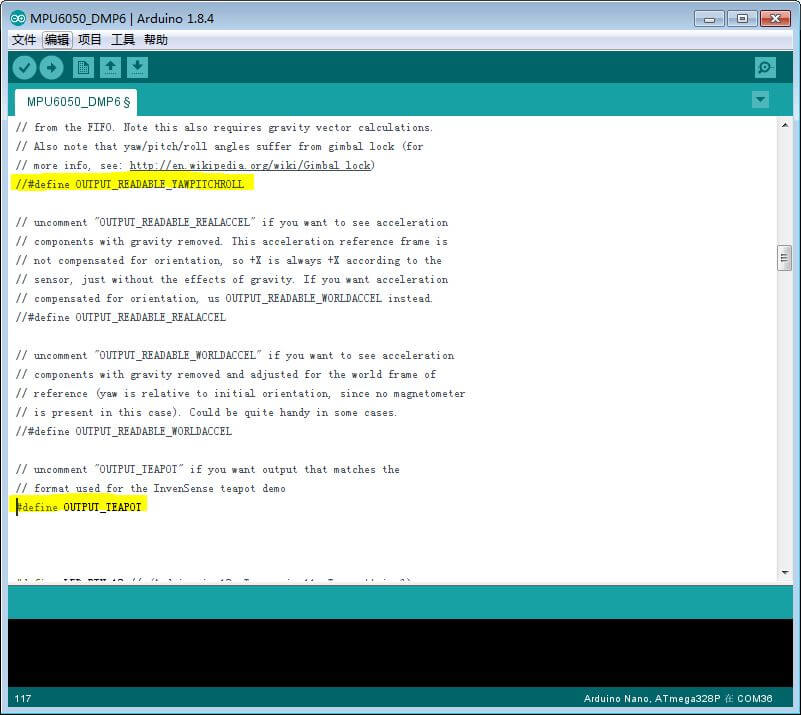
找到:
#define OUTPUT_READABLE_YAWPITCHROLL
修改为:
//#define OUTPUT_READABLE_YAWPITCHROLL
找到:
//#define OUTPUT_TEAPOT
修改为:
#define OUTPUT_TEAPOT
修改MPUTeapot
接下来,打开Processing,依次选择“File –> Open”,然后导航到Arduino IDE的libraries文件夹下(注意区分两个软件的libraries),找到MPU6050 的library文件夹,在这个文件夹下有一个名为“MPUTeapo”的文件(路径为:“MPU6050 –> Examples –> MPU6050_DMP6 –> Processing –> MPUTeapot”),打开文件后,首先应检查并修改其中定义的Arduino连接端口。
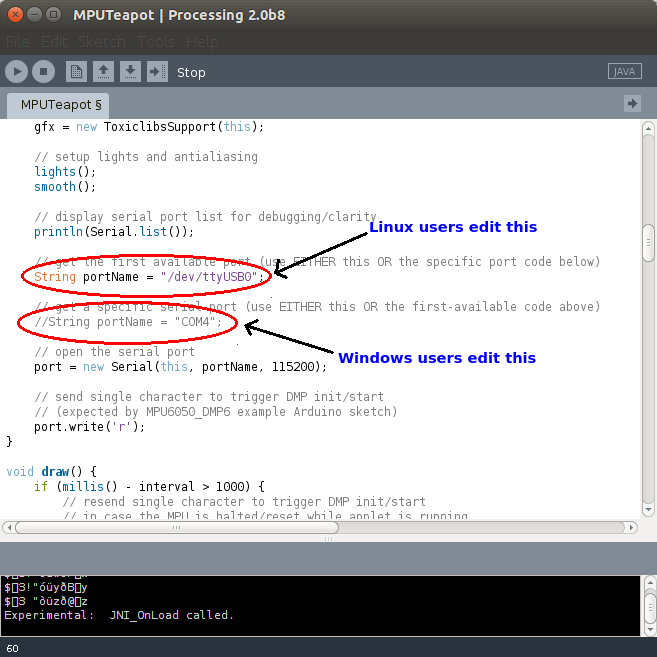
1、Linux或mac用户,查找:
String portName = "/dev/ttyUSB1";修改ttyUSB1为Arduino的实际连接端口。
2、Windows用户,需要注释掉这行代码:
//String portName = "/dev/ttyUSB1";然后找到:
//String portName = "COM4";修改为:
String portName = "COM4";COM4也需要根据你的实际连接端口进行修改。
开始测试
下面可以开始测试:
- 通过Arduino IDE上传代码MPU6050_DMP6.ino,完成后记住不能打开串口监视器。
- 打开Processing,打开修改后的MPUTeapo。
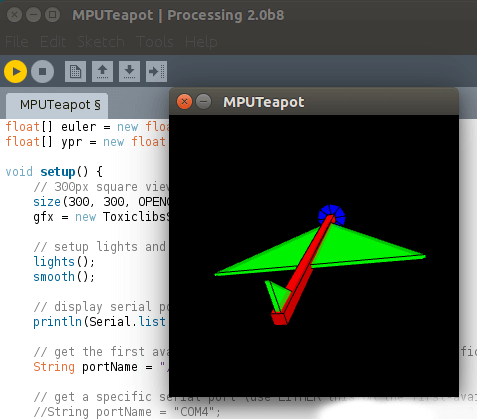
- 按下Processing窗口上类似于“播放”的三角按钮来运行代码MPUTeapo。
- 软件弹出到一个包含有绿色飞机的小窗口,约10秒钟后MPU 6050值基本稳定,可以通过晃动MPU6050传感器来观察小飞机的姿态变化。
一个基于MPU 6050实时数据的3D模型就搭建完成了。
专题:MPU6050的使用技巧:
- Arduino如何使用MPU6050
- MPU6050的I2C接口测试
- 如何用Processing对MPU 6050的值进行3D建模
- 利用MPU6050来控制舵机
- MPU6050如何与树莓派进行连接
- 在树莓派上通过Python读取MPU-6050的数据






